


Note
Click here to download the full example code
Cartpole Tutorial¶
import torch, pypose as pp
import math, matplotlib.pyplot as plt
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
Preparation¶
Create class for cart-pole dynamics
class CartPole(pp.module.NLS):
def __init__(self, dt, length, cartmass, polemass, gravity):
super().__init__()
self.tau = dt
self.length = length
self.cartmass = cartmass
self.polemass = polemass
self.gravity = gravity
self.polemassLength = self.polemass * self.length
self.totalMass = self.cartmass + self.polemass
def state_transition(self, state, input, t = None):
x, xDot, theta, thetaDot = state
force = input.squeeze()
costheta = theta.cos()
sintheta = theta.sin()
temp = (force + self.polemassLength * thetaDot**2 * sintheta) / self.totalMass
thetaAcc = (self.gravity * sintheta - costheta * temp) / \
(self.length * (4.0 / 3.0 - self.polemass * costheta**2 / self.totalMass))
xAcc = temp - self.polemassLength * thetaAcc * costheta / self.totalMass
_dstate = torch.stack((xDot, xAcc, thetaDot, thetaAcc))
return state + _dstate * self.tau
def observation(self, state, input, t = None):
return state
def subPlot(ax, x, y, xlabel=None, ylabel=None):
x = x.detach().cpu().numpy()
y = y.detach().cpu().numpy()
ax.plot(x, y)
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
Create parameters for cart pole trajectory¶
dt = 0.01 # Delta t
len = 1.5 # Length of pole
m_cart = 20 # Mass of cart
m_pole = 10 # Mass of pole
g = 9.81 # Accerleration due to gravity
N = 1000 # Number of time steps
Time and input
time = torch.arange(0, N, device=device) * dt
input = torch.sin(time)
Initial state
state = torch.zeros(N, 4, dtype=float, device=device)
state[0] = torch.tensor([0, 0, math.pi, 0], dtype=float, device=device)
Create dynamics solver object
model = CartPole(dt, len, m_cart, m_pole, g).to(device)
Calculate trajectory
for i in range(N - 1):
state[i + 1], _ = model(state[i], input[i])
Jacobian computation - Find jacobians at the last step
model.set_refpoint(state=state[-1,:], input=input[-1], t=time[-1])
vars = ['A', 'B', 'C', 'D', 'c1', 'c2']
[print(v, getattr(model, v)) for v in vars]
A tensor([[ 1.0000e+00, 1.0000e-02, 0.0000e+00, 0.0000e+00],
[ 0.0000e+00, 1.0000e+00, -3.2700e-02, -3.4183e-07],
[ 0.0000e+00, 0.0000e+00, 1.0000e+00, 1.0000e-02],
[ 0.0000e+00, 0.0000e+00, -6.5400e-02, 1.0000e+00]], device='cuda:0',
dtype=torch.float64)
B tensor([[0.0000],
[0.0004],
[0.0000],
[0.0002]], device='cuda:0')
C tensor([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]], device='cuda:0', dtype=torch.float64)
D tensor([[0.],
[0.],
[0.],
[0.]], device='cuda:0')
c1 tensor([0.0000, 0.1027, 0.0000, 0.2055], device='cuda:0', dtype=torch.float64)
c2 tensor([0., 0., 0., 0.], device='cuda:0', dtype=torch.float64)
[None, None, None, None, None, None]
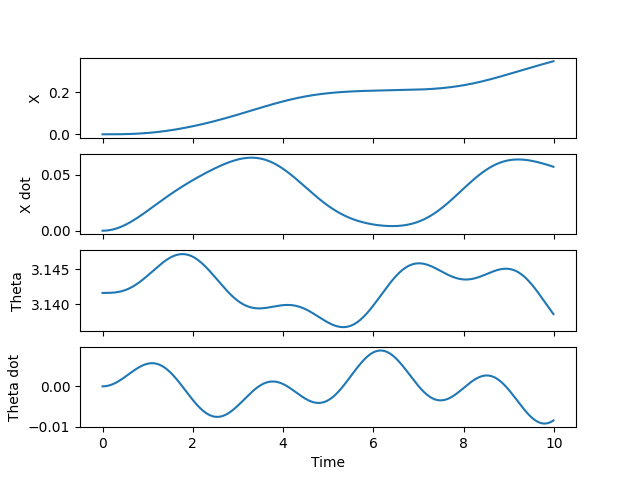
Create time plots to show dynamics
f, ax = plt.subplots(nrows=4, sharex=True)
x, xdot, theta, thetadot = state.T
subPlot(ax[0], time, x, ylabel='X')
subPlot(ax[1], time, xdot, ylabel='X dot')
subPlot(ax[2], time, theta, ylabel='Theta')
subPlot(ax[3], time, thetadot, ylabel='Theta dot', xlabel='Time')
plt.show()
Total running time of the script: ( 0 minutes 0.170 seconds)
