


Note
Click here to download the full example code
Pose Graph Optimization Tutorial¶
import os
import torch
import argparse
import pypose as pp
from torch import nn
from pgo_dataset_tutorial import G2OPGO
import matplotlib.pyplot as plt
import pypose.optim.solver as ppos
import pypose.optim.kernel as ppok
import pypose.optim.corrector as ppoc
import pypose.optim.strategy as ppost
from pypose.optim.scheduler import StopOnPlateau
Define Pose Graph¶
class PoseGraph(nn.Module):
def __init__(self, nodes):
super().__init__()
self.nodes = pp.Parameter(nodes)
def forward(self, edges, poses):
node1 = self.nodes[edges[..., 0]]
node2 = self.nodes[edges[..., 1]]
error = poses.Inv() @ node1.Inv() @ node2
return error.Log().tensor()
@torch.no_grad()
def plot_and_save(points, pngname, title='', axlim=None):
points = points.detach().cpu().numpy()
plt.figure(figsize=(7, 7))
ax = plt.axes(projection='3d')
ax.plot3D(points[:,0], points[:,1], points[:,2], 'b')
plt.title(title)
if axlim is not None:
ax.set_xlim(axlim[0])
ax.set_ylim(axlim[1])
ax.set_zlim(axlim[2])
plt.savefig(pngname)
print('Saving to', pngname)
return ax.get_xlim(), ax.get_ylim(), ax.get_zlim()
parser = argparse.ArgumentParser(description='Pose Graph Optimization')
parser.add_argument("--device", type=str, default='cuda:0', help="cuda or cpu")
parser.add_argument("--radius", type=float, default=1e4, help="trust region radius")
parser.add_argument("--save", type=str, default='../dataset/pgo/save/', help="files location to save")
parser.add_argument("--dataroot", type=str, default='../dataset/pgo', help="dataset location")
parser.add_argument("--dataname", type=str, default='parking-garage.g2o', help="dataset name")
parser.add_argument('--no-vectorize', dest='vectorize', action='store_false', help="to save memory")
parser.add_argument('--vectorize', action='store_true', help='to accelerate computation')
parser.set_defaults(vectorize=False)
args = parser.parse_args(); print(args)
os.makedirs(os.path.join(args.save), exist_ok=True)
data = G2OPGO(args.dataroot, args.dataname, device=args.device)
edges, poses, infos = data.edges, data.poses, data.infos
Namespace(device='cuda:0', radius=10000.0, save='../dataset/pgo/save/', dataroot='../dataset/pgo', dataname='parking-garage.g2o', vectorize=False)
Define Optimizer¶
graph = PoseGraph(data.nodes).to(args.device)
solver = ppos.Cholesky()
strategy = ppost.TrustRegion(radius=args.radius)
optimizer = pp.optim.LM(graph, solver=solver, strategy=strategy, min=1e-6, vectorize=args.vectorize)
scheduler = StopOnPlateau(optimizer, steps=10, patience=3, decreasing=1e-3, verbose=True)
pngname = os.path.join(args.save, args.dataname+'.png')
axlim = plot_and_save(graph.nodes.translation(), pngname, args.dataname)
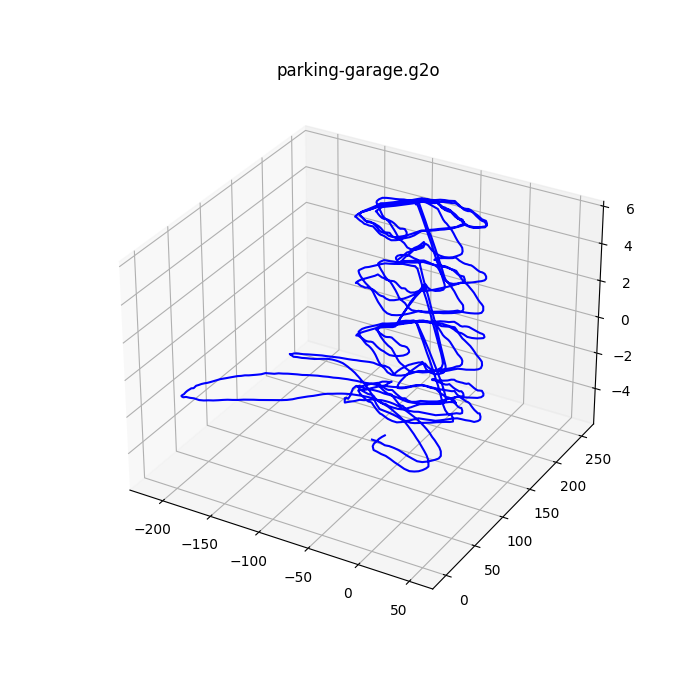
Saving to ../dataset/pgo/save/parking-garage.g2o.png
the 1st implementation: for customization and easy to extend¶
commented out because too time consumming
# while scheduler.continual:
# loss = optimizer.step(input=(edges, poses), weight=infos)
# scheduler.step(loss)
# name = os.path.join(args.save, args.dataname + '_' + str(scheduler.steps))
# title = 'PyPose PGO at the %d step(s) with loss %7f'%(scheduler.steps, loss.item())
# plot_and_save(graph.nodes.translation(), name+'.png', title, axlim=axlim)
# torch.save(graph.state_dict(), name+'.pt')
The 2nd implementation: equivalent to the 1st one, but more compact¶
# scheduler.optimize(input=(edges, poses), weight=infos)
Total running time of the script: ( 0 minutes 0.223 seconds)
